

ホーム > 畜産 > 畜産の情報 > クローラ型自動走行局所施肥ロボットによる子実用トウモロコシの高品質安定多収栽培に関する研究
調査・報告 大分 畜産の情報 2024年5月号
クローラ型自動走行局所施肥ロボットによる子実用トウモロコシの高品質安定多収栽培に関する研究
独立行政法人国立高等専門学校機構 大分工業高等専門学校 准教授 森田 昌孝
独立行政法人国立高等専門学校機構 仙台高等専門学校 教授 園田 潤
独立行政法人国立高等専門学校機構 大分工業高等専門学校 教授 木本 智幸
独立行政法人国立高等専門学校機構 仙台高等専門学校 教授 園田 潤
独立行政法人国立高等専門学校機構 大分工業高等専門学校 教授 木本 智幸
【要約】
トウモロコシは、生育に当たり多くの肥料を必要とする作物であるとともに発育ステージごとに異なる肥料成分養分要求を示す。本調査では、これまで行われなかったトウモロコシ生育中期に施用可能なクローラ(キャタピラ)型自動走行局所施肥ロボットを用いて肥料資源の効率的な施用体系を目指した試験に取り組んだ。
その結果、栽培試験においてはトウモロコシの生育中期における追肥効果を示唆する知見が得られた。また、散布走行試験では自律走行に必要な点群情報として、圃場 内に規則的に位置するトウモロコシ株を認識した。これにより自己位置推定が可能となり、圃場内を自律走行することができた。
1 はじめに
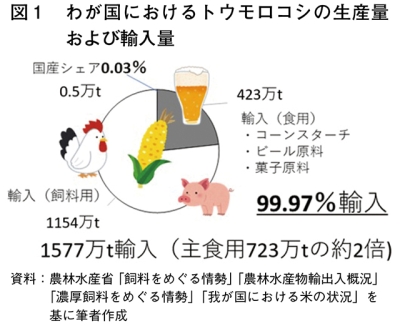
わが国は、トウモロコシを年間約1500万トン輸入しており、その内訳は米国やブラジルが中心となっている。米国のニューオリンズからパナマ運河を通り、1万7500キロメートルにおよぶ太平洋の海路を経て輸入され、その過程で多くの二酸化炭素を排出し、環境へ多大な負荷をかけている。
国内で消費されるトウモロコシのうち、73%は飼料用(輸入)、27%は食用(加工用)・工業用(輸入)であり、国産トウモロコシはわずか0.03%にとどまる(図1)。このように国内消費量の99.97%を輸入し、海外生産に依存する形をとってきた。トウモロコシは、間接消費を含めればわが国最大の消費量となる農作物であると言える。
しかし、人口14億人を有する中国などの旺盛なトウモロコシ需要により、国際価格は高止まりし、近年では主要生産国での戦争勃発により、流通が混乱、まひし、確保すら困難な状況になりつつある。また、円安や原油高もあって、飼料価格も過去最高になるなど高騰しており、食料安全保障の議論がされるレベルにまで到達している。さらに追い打ちをかけるように肥料をはじめとする生産資材も記録的な高騰を続けている。そのような中、堆肥の有効活用が可能な子実トウモロコシの生産が注目され、北海道・東北地方を中心に水田での転作作物として作付けが急拡大している。トウモロコシ栽培においては、慣行的に堆肥と化成肥料を播種 前に全層または側条施肥(注1)する体系がとられている。しかしトウモロコシは、5葉期までの肥料吸収量は少なく、その後、急激に伸び、雌穂 分化期から絹糸抽出期には、吸収量が最大となる(図2)。通常は、5葉期に尿素などを全面散布する方法をとり、収量を確保してきたが、吸収量が最大となる時期への追肥は、散布機が入れないことや作業性の関係からも行われてこなかった。

また、窒素肥料は、降雨による流亡が多く、環境負荷低減や肥料資源の効率的吸収の点からも適時適量散布することが必要である。さらに、「みどりの食料システム戦略」においても化学肥料の低減が求められており、効率的な散布体系を開発することは、その一助にもつながる。
長大作物であるトウモロコシは、生育速度が速く、絹糸抽出期には、草丈が2メートルを超え、散布作業機械が 一方で、クローラ型自動走行局所施肥ロボットは、約50キログラムまで肥料を積載可能であり、トウモロコシの条間75センチメートルの狭い場所にも入り、株基に適時適量をスポットで施用することが可能である(写真1)。また、窒素成分の流出速度が速く、安価な硫安(硫酸アンモニウム)なども使用することができ、経費の節減にもつながる可能性がある。さらに、クローラ型自動走行局所施肥ロボットの導入により、繁忙期である春期に施肥作業を省略することが可能であり、飼料生産現場における省力化にもつながる。
わが国では、生産者の高齢化や担い手の不足が深刻化しており、農業の持続性を確保するためにもロボット技術やAI、IoTなどの技術を活用したスマート農業の社会実装が求められている。このことから筆者らは、クローラ型自動走行局所施肥ロボットの開発を目指し、生産現場での応用に向けて、トウモロコシ生育中期にロボットを条間に進入させた場合の環境調査ならびにトウモロコシ株基へ少量多回散布を行い、多収に向けた知見を得ることを目的とした。
(注1)全層施肥は、圃場表面に肥料を散布しロータリー
2 肥料の多回施用が子実トウモロコシの生育と収量に及ぼす影響について
生育時の肥料吸収量から推定される時期に化成肥料の多回散布を実施し、子実収量の比較を行い、得られたデータから施肥条件や肥料効果を整理するため二つの調査を実施した。
(1)複数追肥散布試験
ア 目的
トウモロコシは、肥料要求量が他の作物に比べて多く、スイートコーンなどでは、5葉期および雄穂 抽出期に追肥と穂肥 を散布することが一般的である。子実トウモロコシは、作物の特性上、子実部分の充実が求められており、穂肥の施肥は、収量性向上につながる可能性がある。
また、トウモロコシは、生育ステージごとに肥料を要求することが知られており、生育ステージごとに必要な肥料を局所的に施用することは効率的な肥料成分の活用だけでなく、収量増加にも貢献するかもしれない。このことから本調査では、雄穂抽出期の2週間前に慣行法よりもさらに追肥し、その増収効果を確認することとした。
イ 材料と方法
試験場所は、大分県農林水産研究指導センター内飼料作物圃場(畑地)を借用し、実施した。供試品種はデントコーン品種とし、KD641、AX-152を用いた。播種については、KD641では播種機を用いて令和4年4月20日に行った。AX-152は、4月25日に点播した。播種間隔は、KD641については株間21センチメートル、条間75センチメートルとし、AX-152は株間20センチメートル、条間75センチメートルとした。調査区は、準備した試験圃場を三つに分け、連続する中庸な10株を調査対象株とし、3反復とした。試験区は、慣行区(追肥1回)と追肥区(追肥2回)を設けた。施肥条件は、慣行区では、基肥(側条)+5葉期での追肥(全層)1回の計2回とした。追肥区は、基肥(側条)+5葉期追肥+雄穂抽出期2週間前追肥の計3回に分け散布した。
施肥は、KD641については4月18日に牛ふん堆肥を10アール当たり2.5トン、石灰を30アール当たり200キログラム散布し、化成肥料(成分値〈窒素-リン酸-カリウム(以下同じ)〉:14-14-14)は、播種時に側条施肥し、窒素成分で10アール当たり5キログラムを散布した。追肥(1回目)は、尿素を5月15日に窒素成分で10アール当たり5キログラムを全面散布した。
追肥区の追肥2回目は、化成肥料(成分値14-14-14)を窒素成分で10アール当たり5キログラムを6月16日に条間散布した。追肥2回目は、窒素成分で合計で10アール当たり15キログラムとなった。
AX-152は、4月18日に牛ふん堆肥を10アール当たり2.5トン、石灰を30アール当たり200キログラム散布し、化成肥料(成分値14-14-14)は、窒素成分で10アール当たり10キログラムを播種時に全層施肥した。追肥は、尿素を5月15日に窒素成分で10アール当たり5キログラムを散布した。
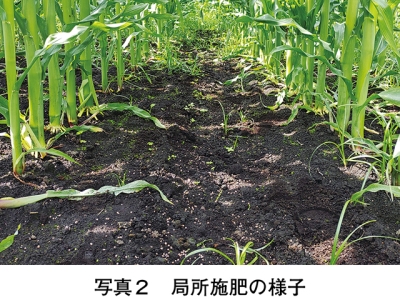
追肥区の追肥2回目は、化成肥料(成分値14-14-14)を窒素成分で10アール当たり5キログラムを6月16日に条間散布した(写真2、3)。追肥2回目は、窒素成分で合計10アール当たり20キログラムとなった。
除草剤は、播種後に土壌処理剤を散布し、7葉期に達した5月27日に茎葉処理剤を散布した。

ウ 結果と考察
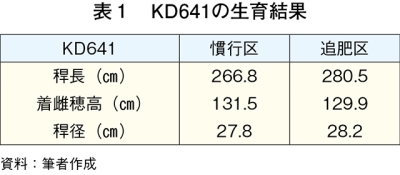
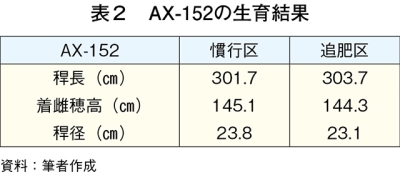
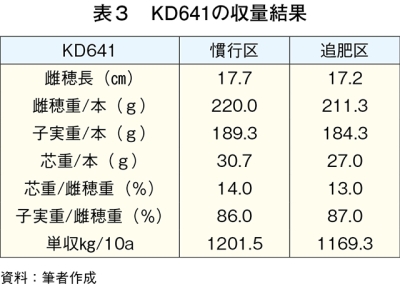
発芽日は、KD641は4月25日、AX-152は5月1日となった。雄穂抽出期は、KD641は6月28日、AX-152は7月2日であった。絹糸抽出期は、KD641は6月29日、AX-152は7月3日であった。生育調査の結果を表1、2に示した。KD641は、追肥によって稈長 が長くなった。稈径 、着雌穂高では、顕著な差は見られなかった。AX-152は、稈長、稈径、着雌穂高について大きな差は確認できなかった。
収量調査の結果を表3、4に示した。KD641は、追肥による収量の増加にはつながらなかった。AX-152は、追肥によって収量が約8%程度増加する傾向がみられた。また、雌穂1本当たりの子実重量も重くなった。
以上の結果から、追肥による顕著な収量増加を期待することができなかった。この原因として、未熟トウモロコシなどでの追肥体系においては、リンを基肥として多く散布する体系をとっている。本試験では、初期、中期でのリン分が不足していたことや追肥2回目の散布時期が早くなったことなど生理的要求量や時期が合わず、徒長傾向を示すなど子実収量増加に肥料成分を活用することができなかったことが示唆された。このことから子実重量充実を目指した追肥を行う場合には、費用対効果も考慮した上で散布量や散布回数、散布時についてより細かい試験設計による実施を行う必要がある。

(2)少量多回施肥試験
ア 目的
トウモロコシは、肥料成分をステージ別に要求する量が異なる。ステージ別の要求量に応じた施肥を行うことにより肥料反応性を確認するため、少量多回施肥試験を実施した。
イ 材料と方法
試験は、大分県佐伯 市の耕作放棄地(地目:水田)を利用して行った。供試品種は、市販デントコーン品種であるKD641を供試した。試験圃場は、耕起は行わず、現植生を刈払機で刈り取り、除去した。その後、株間20センチメートル、条間75センチメートル間隔で不耕起点播を行った。播種は7月24日に行った。試験区は、慣行区、少量多回区、無施肥区を設定した。肥料設計は、表5に示した。化成肥料は成分値で8-8-8のものを用いた。慣行区は、窒素を基準に10アール当たり10キログラムを基肥として全層施肥とした。少量多回区は、散布日に窒素成分で記載の量を散布した。散布方法は、写真4の通り株元に散布した。無施肥区は、肥料散布を行わなかった。除草剤散布は行わず、刈払機にて株間および条間を管理した。


ウ 結果と考察
発芽はいずれの区も7月30日であった。出穂期は慣行区9月15日、少量多回散布区9月16日、無施肥区は確認できなかった。
草丈と稈長の推移を図3、写真5〜8に示した。草丈は慣行区が他の2区に比較し、高く推移した。9月16日には慣行区、少量多回散布区で出穂したため稈長を測定した。また、9月16日の慣行区で葉の黄化が顕著に見られた(写真8)。少量多回散布は、初期の生育はやや劣るものの9月16日まで黄化せず、窒素成分の効果が期待された。無施肥区は最も草丈が低くなり、初期から葉の黄化が見られた。
本試験では、慣行区に比較して20%程度に減肥した設計にて実施した少量多回施肥は、葉色、草姿が充実していた。一方で、慣行区は黄化を確認できたことから生育期間中に肥料不足に陥ったことが推察された。また、写真5に示した通り、全層施肥によって、雑草の緑色化が確認され、トウモロコシ生長への肥料利用率が低下したことが確認された。
以上から、少量多回施肥は、肥料の効率的な活用につながる可能性があり、みどりの食料システム戦略へ貢献することが期待された。今後は、各ステージに合わせて必要な量を施肥できる局所施肥体系を構築することが必要である。なお、本試験は令和4年台風第14号による被害を受け、収量調査の実施ができなかったため、追跡調査を行う必要がある。





3 クローラ型自動走行局所施肥ロボットの開発
子実トウモロコシ栽培における施肥は、基肥と5葉期に尿素を散布する体系が行われてきた。しかし、トウモロコシは生育ステージごとに肥料要求量が異なっており、スイートコーンでは雄穂抽出期に穂肥を行う体系も採用されている。
一方で、飼料用作物の生育期中期には草丈が2メートルを超える場合が多く、追肥を考えた場合、トラクターが入れる高さを超過し、ブロードキャスター(肥料散布機)による散布は困難である。また、高床の乗用中間管理作業機などによる散布についても難しい。草丈に関係なく散布可能なドローンによる方法もあるが、粒状肥料が茎の芯に入ってしまい、株元までに到達する肥料が少なく、肥料ロスにもつながる。
そこで狭小条間空間に進入し、株元にスポット散布することが可能なロボットがあれば、前述の課題解決につながり、肥料の効率的な活用や収量増加につながるかもしれない。このことからロボット散布に向けた開発条件などを整理するためにトウモロコシ圃場内における自律走行に係る試験と軟弱不整地地面における重量物運搬走行試験の二つを行った。
(1)自律走行試験
ア 目的
トウモロコシが生育中の圃場内における環境調査ならびに狭小空間における人工知能を搭載した自律走行可能なクローラロボットによる走行試験を実施し、トウモロコシ株基に少量多回施肥可能な散布機械開発に向けた基礎情報の収集を目的とした。
イ 材料と方法
調査は、宮城県名取市内の子実トウモロコシ圃場にて行った。品種はP1184とし、6月17日に株間18センチメートル、条間75センチメートルで播種した。施肥は化成肥料(17-17-17)を現物で10アール当たり80キログラム基肥として全層散布し、追肥は尿素を現物で10アール当たり10キログラム散布した。調査日は、播種後96日(9月21日)であった。調査時の生育は、稈長267.4センチメートル、着雌穂高120.1センチメートル、稈径20.9ミリメートルであった。
(ア)クローラロボットの構成
設計・作成したクローラロボットのプロトタイプを写真9に示した。CuGOV3(CuboRex社)のクローラモジュールと荷台部、アルミフレーム、制御回路、電源バッテリー、各種センサーから構成されている。クローラ幅は、片側13.5センチメートルであり、左右ユニットを並列させた最小機体幅は、33センチメートルとなる。アルミフレーム加工により機体幅は調節可能で、最大積載量は、約80キログラムである。各種センサーは、自作した治具や部品により取り付けした。

(イ)システム構成
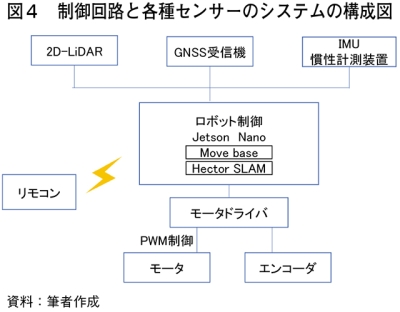
図4に制御回路と各種センサーのシステムの構成図を示した。データ処理を行うため、GPU(注2)を搭載したNVIDIA Jetson Nano(以下「Jetson」という)を中心にシステムを構成した。自動制御に必要なGNSSモジュール(注3)など自律走行に必要な外部センサーを備え、また、手動動作が必要になった際に外部コントローラの信号を取得するためのコントローラボードをそれぞれUSBによって接続した。また、緊急停止が可能となるよう制御ボタンを備えた。
コントローラボードはCubeOrange+とコントローラ受信機(Cohac ∞ Chronosphere-L6 II)で構成されており、ボード上のスイッチからもクローラロボットの走行モードを変更できるよう製作した。クローラモジュールの高出力モータを駆動させるためのモータドライバを二つ、それぞれSPI通信(注4)によりJetsonからモータ回転の指令値を伝えている。JetsonはSSH接続(注5)によってPCと接続を行い開発する。2D−LiDAR SLAMは、RPLIDAR S1(SLAMTEC社)を機体上部に設置し、レーザースキャニングによる点群マップ(注6)を出力した。
(注2)GPU(Graphics Processing Unit):画像や動画を描画するための処理を行う画像処理装置。
(注3)GNSSモジュール:GNSS(Global Navigation Satellite System)は、衛星測位システムのことで、衛星からの信号を用いて自己位置を決定する測位システムである。その受信装置のこと。
(注4)SPI(Serial Peripheral Interface)通信:デバイス間の通信を高速化するために必要な信号を最小限にしたシリアル通信インターフェースのこと。
(注5)SSH接続(Secure Shell):暗号や認証の技術を利用して安全にリモートコンピュータと通信するためのプロトコルのこと。
(注6)点群マップ:レーザー光を照射し、それが物体に当たり、跳ね返るまでの時間から距離を測定するセンサーによって得られた多数の点を地図上に示したもの。
(ウ)自動制御の手法
トウモロコシは、株間18〜21センチメートル、条間75センチメートルで規則正しく播種されており、欠株が少ないため地面からの進行方向に対しては列状を呈している。クローラロボットは、条間75センチメートルの間を走行し、肥料の適期散布機構を設置する荷台スペースを備える。広大なトウモロコシ圃場内を正確に走行するため、クローラロボットはGNSSの測位精度を補強するため、国立研究開発法人宇宙航空研究開発機構(JAXA)の準天頂衛星システム QZSS(注7)の補強信号を受信可能なセンチメーター級測位補強サービス(注8)であるCLASを利用し、測位データを得た。使用したモジュールの測位確度は、移動時で10センチメートル以下と推定される。測位誤差によってはクローラロボットがトウモロコシに接触する恐れがある。そのためLiDAR SLAMによってトウモロコシ列を検知し、条間(列)と思われる部分からトウモロコシとトウモロコシの中心座標を求め、座標の中心(ロボット進行方向)から条間の中心との乖離 を算出し、その値に応じてクローラロボットの旋回動作を制御することで自動制御の誤差を吸収し、進行方向へ前進させた。
(注7)QZSS(Quasi-Zenith Satellite System):準天頂衛星システムのことで、GPSとの相互補完により、測位精度を高めるために運用されている衛星のこと。
(注8)高精度に測位を行うために電子基準点のデータから補正情報を計算し、正確な位置情報を得るための情報サービスのこと。
(エ)自動制御試験の結果
トウモロコシ圃場にて、クローラロボットをGNSSおよびLiDARを用いて自己位置推定ならびに自動走行制御実験を行った結果、クローラロボットは、条間75センチメートルの狭いトウモロコシの畝 間を正しく走行することができた。
ウ 結果と考察
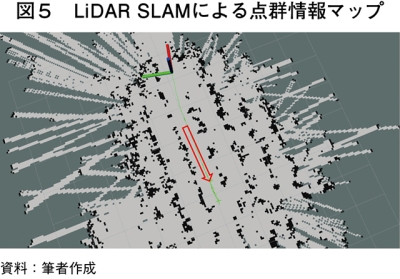
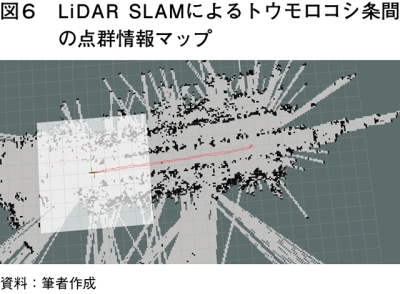
トウモロコシ圃場内でクローラロボットを走行させ、LiDARによる点群情報のマップ化を行ったところ、トウモロコシ株を列として、認識することが可能であった(図5、6)。また、LiDAR SLAMによる自己位置推定により、トウモロコシ圃場内で自律走行が可能なことも確認することができた(写真10)。自動走行の速度が遅いため、今後は高速に移動できるようクローラロボットを改良することが重要となる。さらに、クローラロボットに肥料散布機構設置の検討を行い、散布する必要がある。
一方で葉齢が進み、葉の老化や虫害による折損などがあった場合、障害物として認識してしまい、走行が停止することが確認された。このことから、前方部に障害物除去機構を設置するなどの対応により、円滑な自律走行が可能であることも確認された。

(2)重量物積載試験
クローラロボットを活用して、肥料散布を行うには、重量物を積載した状態で圃場内を走行し、不整地でも運搬できるかを確認する必要がある。そこで宮城県名取市の子実トウモロコシ収穫後の圃場において、クローラロボットを用いた重量物運搬試験を実施した(写真11)。
ア 材料と方法
クローラロボット機体およびシステム構成は、自律走行試験と同等のものを用いた。荷台部分は肥料運搬ができるように加工した。また、走行については、無線走行により制御した。クローラロボット機体には、模擬肥料(25キログラム)を積載して走行試験を実施した。25キログラムと設定した理由は、一般的な肥料の流通単位20キログラムと散布機器5キログラムを想定して設定した。
イ 結果と考察
無線走行試験の結果、不整地の圃場内において25キログラムの重量を積載して、問題なく運搬走行できた。今後は、重量物を積載した状態での消費電力について整理し、稼働時間も含めた構成や設計が必要である。
4 まとめ
これまでの子実トウモロコシ栽培における現行の機械化体系では、栽培中期に安価で即効性のある肥料を散布することが難しく検討が行われてこなかった。本調査の実施により、重量物を積載したクローラロボットを栽培中期の狭い条間に進入させ、自律走行による施肥が可能であることを確認できた。肥料散布機器は、すでに開発されており、それらを加工改造し、荷台に装着することが可能である。今後は、散布量を車速や自己位置から把握し、調節可能な手法を用いた散布方法を検討することが必要である。
栽培試験については、明確な成果を単年度で確認することができなかった。栽培に当たっては堆肥散布の有無と畜種、各種施肥設計や散布するタイミング、気温などにより選択する肥料や体系が多く、今後はどの肥料をいつ散布することが効果的かを確認することが不可欠である。これにより局所施肥の有効性ならびに施肥精度向上につなげられるため、今後も継続して試験を行う必要ある。
子実トウモロコシを栽培するには、堆肥活用が推奨されている。しかし、畜産農家の集約により、堆肥生産地も偏在しており、耕種農家と畜産の需給が必ずしも一致しない。また、圃場への外来雑草侵入を懸念する生産者も少なくない。そのような地域では、化学肥料での栽培に頼らざるを得ないため、化学肥料の効率的な使用が求められており、みどりの食料システム戦略の観点からも必要とされている。スマート農業の推進により可変施肥など効率的利用の技術開発が進められているが、クローラロボットなどによる局所的かつ細密な施用体系の構築については、食料安保の視点からも今後拡大が望まれる研究分野であると思われる。
また、狭いトウモロコシ条間に進入することができる自律走行型クローラロボットは、あらゆる農作業への応用展開の可能性を秘めている。例えば、粗大重量物である堆肥の散布も可能であり、春季から夏季での連続散布による作業分散や散布労力軽減につながる。さらに、ステージ別かつ肥料成分ごとの施肥、夜間散布や気象連動による臭気公害低減、獣害忌避 効果、フロント部への除草ヘッドの装着などである。今後は、これらに付随するデータを積み重ねていくことにより機械の汎用利用につながり、機械費負担軽減に貢献することも可能である。









